
 Por Cristian Ramón Marín Por Cristian Ramón Marín @Crms74 | Google+ |
No hay duda: la electrónica es un componente imprescindible en el motociclismo actual. Con motos que superan los 200 cv y recorren algunas curvas a 120 km/h con más de 60º de inclinación, es imprescindible que algún elemento tecnológico proteja a los pilotos de posibles errores. Pero también hay que ser realista: todas las fábricas están interesadas en utilizar tantos controles electrónicos como permitan los reglamentos para arañar milésimas al reloj y, en el camino, desarrollar tecnología que ayude a vender más motos que el rival que hay en el box de al lado.
El control de tracción es uno de los elementos más importantes de la electrónica. Los pilotos dedican una gran cantidad de horas durante sus carreras deportivas a trabajar en él y dar pasos hacia el límite de la física. ¿Cómo funciona? ¿De qué forma ayuda a ir más rápido? ¿Cuáles son los límites? Aquí tienes toda la información que necesitas por cortesía de Vicente Pechuan, ingeniero electrónico del MV Agusta Reparto Corse en el Mundial de Superbike (click aquí para conocer más sobre el proyecto de la marca italiana).
¿Qué es el control de tracción?
El control de tracción (o Traction Control, en inglés) es un sistema electrónico "que se encarga de vigilar el comportamiento de la rueda trasera de una moto", impidiendo que se excedan ciertos límites. Se trata, por tanto, de "una estrategia de la centralita que sirve para proteger al piloto de situaciones complicadas, permitiéndole ir más rápido y más seguro al ser más constante".
"El TC, como muchas estrategias de control motor, interfiere en lo que hace el piloto. Por tanto, el piloto no es, como era hace años, el patrón único de lo que hace el motor. Ahora, entre el piloto y lo que hace el propulsor, que se transmite a través de la rueda trasera en forma de empuje, te encuentras con la ECU, que recibe toda la información de los diferentes sensores que hay por toda la moto -entre los cuales destaca la plataforma inercial (conocer más)- para decidir lo que debe hacer", detalla el ingeniero electrónico.

En resumen, la ECU se encarga de cortar potencia del motor cuando el piloto, a través del gas, está pidiendo demasiado. Demasiado para la seguridad, porque se va a producir una caída, o demasiado para ir rápido, porque la rueda patina en exceso, por ejemplo.
¿De qué forma cortará esa potencia? Ese es, precisamente, uno de los factores clave de la electrónica, porque cada software (la centralita trabaja y se configura a través de un programa informático) es distinto. Cada marca y cada piloto pueden tener una filosofía distinta para entender cuáles son los límites y cómo se debe trabajar con ellos.
Las tres fases
Para entender el funcionamiento de un control de tracción, hay que analizar las tres fases por las que discurre el trabajo de un ingeniero electrónico:
1. Identificar el parámetro que dice que la moto está patinando. El patinaje de la rueda trasera, el movimiento de culebreo… En los sistemas primitivos, solo se utilizaban los giros del motor. Se definía un número máximo para la derivada de las RPM (velocidad con la que las RPM crecen durante una aceleración) para cada marcha, y si había un pico en el gráfico, se consideraba que la moto estaba patinando demasiado. En ese momento, la centralita rebajaba la potencia del motor.
En la actualidad, los controles "buenos" trabajan midiendo la fuerza a la rueda trasera. "Es complicado, pero hay que hacer toda la cadena de cálculos. Con mismo par motor, la fuerza a la rueda posterior cambia dependiendo de la marcha, por ejemplo. También en el ángulo de inclinación. Por eso, se calculan targets [objetivos]: para la moto recta, para la moto en el ángulo máximo de inclinación... Se crean diversos mapas específicos para cada curva", detalla Pechuan.
2. Establecer los límites en los que, ese parámetro, no debe superarse. Lo recordamos: una moto puede ser más rápida patinando un poco a la salida de las curvas que cortando potencia para evitarlo. Depende de muchísimos factores: el estilo de pilotaje, el set-up de la moto, la confianza del piloto, el estado del asfalto… El ingeniero electrónico, en colaboración con el piloto y el resto del equipo técnico, pondrá los límites.
3. Decidir cómo se quiere el control de tracción. ¿Muy invasivo? ¿Que trabaje constantemente y el piloto lo sienta? ¿Que solo sea un ángel de la guarda en caso de que el piloto cometa un error?
.jpg)
Y aquí entra la forma en que el TC actúa y corta potencia. Hay cuatro:
A) A través de las mariposas de admisión. La centralita toma una decisión si se abre demasiado el gas. Si la demanda es abrir las mariposas un 60%, y es demasiado, el control de tracción decide cerrarlas un poco. Entra menos aire en el cilindro y la combustión es menos potente. Se consigue el mismo efecto que si el piloto girase un poco menos el puño del gas. Lo hace mucho más rápido de lo que el piloto pueda sentir o intuir. Para medidas sobre el deslizamiento de la rueda se trabaja con rangos entre los 200 y los 500 Herzios, es decir, entre 200 y 500 veces por segundo. No hay piloto en el mundo que sea tan rápido.
- Pros: Es una medida muy suave. Disminuye el consumo de gasolina, porque el motor sabe cuánta debe echar por los inyectores en función del aire que entra.
- Contras: La respuesta no es inmediata. Desde que se cierran las mariposas hasta que la combustión en los cilindros es menos potente pasa un poco de tiempo. No puedes utilizarla para momentos puntuales, debe ser algo constante que trabaje junto a otras cosas que sí son más rápidas.
B) Retrasando la chispa de encendido en los cilindros. En este punto hay que conocer un concepto: el spark advance o anticipo de encendido, que es el momento en el que se decide encender la chispa que provocará la combustión en el interior de los cilindros. Si se retrasa la chispa, se empeora la combustión y el motor es menos potente. Solo por el hecho de atrasar el encendido.
- Pros: Es inmediato. En cuanto retrasas la chispa la combustión está degradada.
- Contras: Retardando la chispa, se aumenta la temperatura en el gas de escape. Podrías quemar el motor o quemar el escape si te pasas. Otra cosa mala que tiene en común con las mariposas es que, en muchas ocasiones, el piloto no puede notar que el TC está actuando. Cuando más suave sea el control, menos feeling tendrá el piloto. Al máximo se da cuenta de que entre lo que él pide y lo que la moto hace hay algo en medio. Ellos lo llaman elasticidad del motor, que se comporta como un muelle: "No hace lo que yo quiero", dicen. No sienten el motor, y eso les quita mucha confianza. Esto, a algunos pilotos, les fastidia de forma particular. Leon Camier, del equipo MV Agusta en WSBK, es un ejemplo de ello. "Yo he tenido que trabajar con el TC de un modo particular para que él pueda sentir que funciona y está en el límite", relata Pechuan.
C) Cut (Corte): Eliminar directamente la chispa, en vez de atrasarla. En el número de cilindros que se crea oportuno.
- Pros: Es inmediato y perceptible para el piloto. Incluso a pie de pista se puede escuchar a la salida de las curvas con un pequeño sonido parecido a un burbujeo que podría ser parecido a cuando una moto de calle entra en corte por ir demasiado revolucionada.
- Contras: Excesivo consumo de gasolina. Si se utiliza esta opción constantemente, se estaría escupiendo gasolina sin utilizarla.
D) Gasolina: Introducir, para la misma cantidad de aire, menos gasolina.
- Pros: Reducciòn del consumo de gasolina.
- Contras: No se suele utilizar porque hay un gran retardo que incluso haría que las cosas no estuvieran bajo control. Si se opta por esta solución, hay que hacerlo de forma muy controlada y estudiada.
Mejor en imágenes
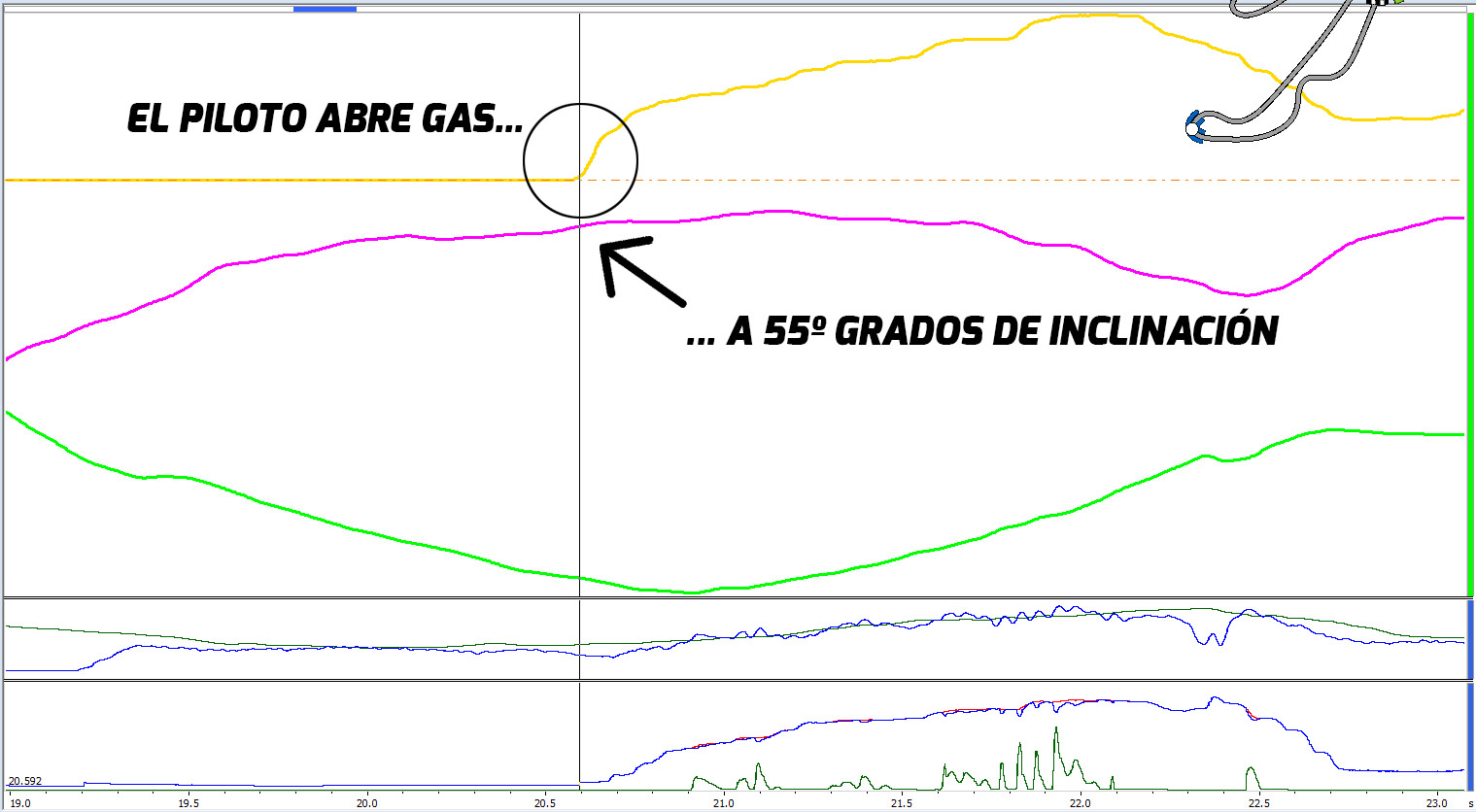
Empecemos por un gráfico sencillo y real, extraído de un fin de semana de competición. Se trata del circuito de Misano: la línea amarilla representa el gas del piloto. Donde se corta con la línea gris empieza a acelerar después de una frenada. En violeta se observa el ángulo de inclinación (curva de derechas, 55º en el momento de abrir el acelerador), que se estabiliza cuando el piloto da gas y vuelve a a variar cuando afronta la siguiente curva.
Una vez controlada la información sobre el gas y el ángulo de inclinación, hay que fijarse en la zona verde de la siguiente imagen. Esa línea verde es la que define el target u objetivo (fuerza a la rueda trasera, spin...). El ingeniero electrónico introduce una serie de valores que, si se ven superados por esa línea, harán que el control de tracción actúe.

Aquí viene el quid de la cuestión: la línea roja, en el àrea inferior, muestra el par motor que el piloto está pidiendo al abrir gas, y la línea azul que la acompaña enseña el par que el motor ofrece finalmente. ¿Cuánto está cortando? La línea verde que hay en la parte inferior del gráfico lo especifica.
Las líneas roja y azul dejan de coincidir en aquellos puntos donde el control de tracción hace su trabajo:

Filosofías distintas: el clásico Stoner vs. Lorenzo
No es ningún secreto: Casey Stoner es uno de los pilotos que menos control de tracción utilizaba. En el otro lado de la balanza están pilotos como Jorge Lorenzo, que en la era de la electrónica propia "abría sin contemplaciones", o Héctor Barberá, que necesita sentir el control de tracción "desde el primer momento", según fuentes del paddock.
Al fin y al cabo, como recuerda Pechuan, "se trata de una cuestión de confianza". “Cuando entré en MV Agusta, lo primero que hice fue pedirle a Leon Camier que probara la moto sin electrónica. Me dijo: «El comportamiento es muy natural, y se parece mucho a la moto con ayudas, pero no me fío». Se trata más de dar confianza al piloto, que sepa que puede llevar la moto al límite y si se pasa un poco tiene un ángel que le protege”. Esta es una filosofía que HRC también aplica con sus pilotos.
Los controles de tracción antes de la electrónica unificada
Antes de que la electrónica común de Magneti Marelli llegara a la categoría reina a finales de 2015, existían controles de tracción bastante más avanzados que los actuales. La razón es simple: cada fábrica contaba con su propio sistema y tenía un cantidad incalculable de horas de experiencia trabajando con ella. Ese trabajo, además, se centraba en una línea concreta.
Si Honda había diseñado una moto cuya fortaleza era la salida de las curvas (¡Cuánto se hablaba del cambio seamless en su momento!) pero sufría en las frenadas, ¿por qué no desarrollar un control de tracción que potencie los puntos fuertes y reduzca las debilidades?
Leer también | Así funciona el control anti-jerk de MotoGP y WSBK
"Las cosas estaban muy perfeccionadas", reconoce Pechuan: "Podías permitirte el lujo de tener un control de tracción muy invasivo, pero en el modo justo. Seguramente, esa es la razón por la que los pilotos se habían habituado a abrir el gas sin contemplaciones".
Solo para ofrecer una perspectiva más amplia: los controles previos a Magneti Marelli como único proveedor de software eran capaces de cambiar los targets (esos límites a partir de los cuales el sistema empieza a actuar) ellos solos. Durante una carrera o una tanda de cualquier entrenamiento libre, en función de distintos factores. Se les llama sistemas "adaptativos". Ahora, en MotoGP, es el piloto quien cambia de mapa a través de unos botones en el manillar (conocer más).
Grip mecánico vs. grip electrónico
Esta es una aclaración importante: "El Traction Control no te ofrece prestaciones donde la moto no puede darlas. Si la moto no tiene grip mecánico, el control cortará potencia para evitar que la rueda patine demasiado". Una moto sin control de tracción pero con mucho grip mecánico avanzará mucho más rápido. KTM sufrió este problema durante sus primeras carreras en MotoGP: más allá de probar nuevos settings, basculantes y chasis no podían hacer nada para remediar la falta de agarre en el tren posterior. De donde no hay grip, no se puede sacar, como diría el refrán.
El control de tracción idílico
Pechuan lo confirma: a nivel teórico, se podría crear un control de tracción tan sofisticados que, junto a un sistema de frenada electrónica, el piloto, literalmente, podría ir con el gas totalmente abierto durante una vuelta completa al circuito y que la electrónica hiciera todo el trabajo.
Se trata de algo casi utópico que es más fácil en la Fórmula 1, porque la dinámica de los vehículos de cuatro ruedas es mucho más conocida y predecible, pero la dinámica de una moto es mucho más complicada. "No existe un simulador capaz de simular al 100% el comportamiento de una moto porque existe un factor, llamado piloto, que se mueve como él quiere y no es simulable de forma repetida". Cualquier pequeño cambio en la moto tiene un efecto exponencial. Nunca puedes intuir al 100% la forma en que influirá un cambio.
La forma más "realista" de hacerlo es conociendo a la perfección el estado y el comportamiento del neumático. Con esta medida, se puede establecer el límite en función de otros parámetros, como el ángulo de inclinación o el par que llega a la rueda trasera, y que el control de tracción actúe únicamente si se va a sobrepasar el límite del neumático.
Cuando el humano supera la tecnología
Si la tecnología actual trabaja en milisegundos, ¿cómo es posible que un piloto como Casey Stoner fuera más rápido con menos control de tracción que sus rivales?
Hay dos grandes claves: la primera es la confianza. Si un piloto se siente más rápido controlando al 100% el gas, acabará siendo así. La segunda tiene que ver con la teoría. Cuando un ingeniero electrónico configura el control de tracción, está planteándose unos límites que no tienen por qué ser reales.
Por ejemplo: el ingeniero electrónico de Jorge Lorenzo decide que en la entrada a meta de Phillip Island el motor no puede otorgar más de 80 Nm en un determinado momento, y es un límite adecuado al estilo de su piloto. Pero, quizás, Stoner era capaz de utilizar otra trazada y aplicar una fuerza de 85 Nm, o el ingeniero había errado ligeramente el cálculo y el límite real era de 82 Nm, por ejemplo. La práctica, a veces, supera a la teoría.
{kind=link}